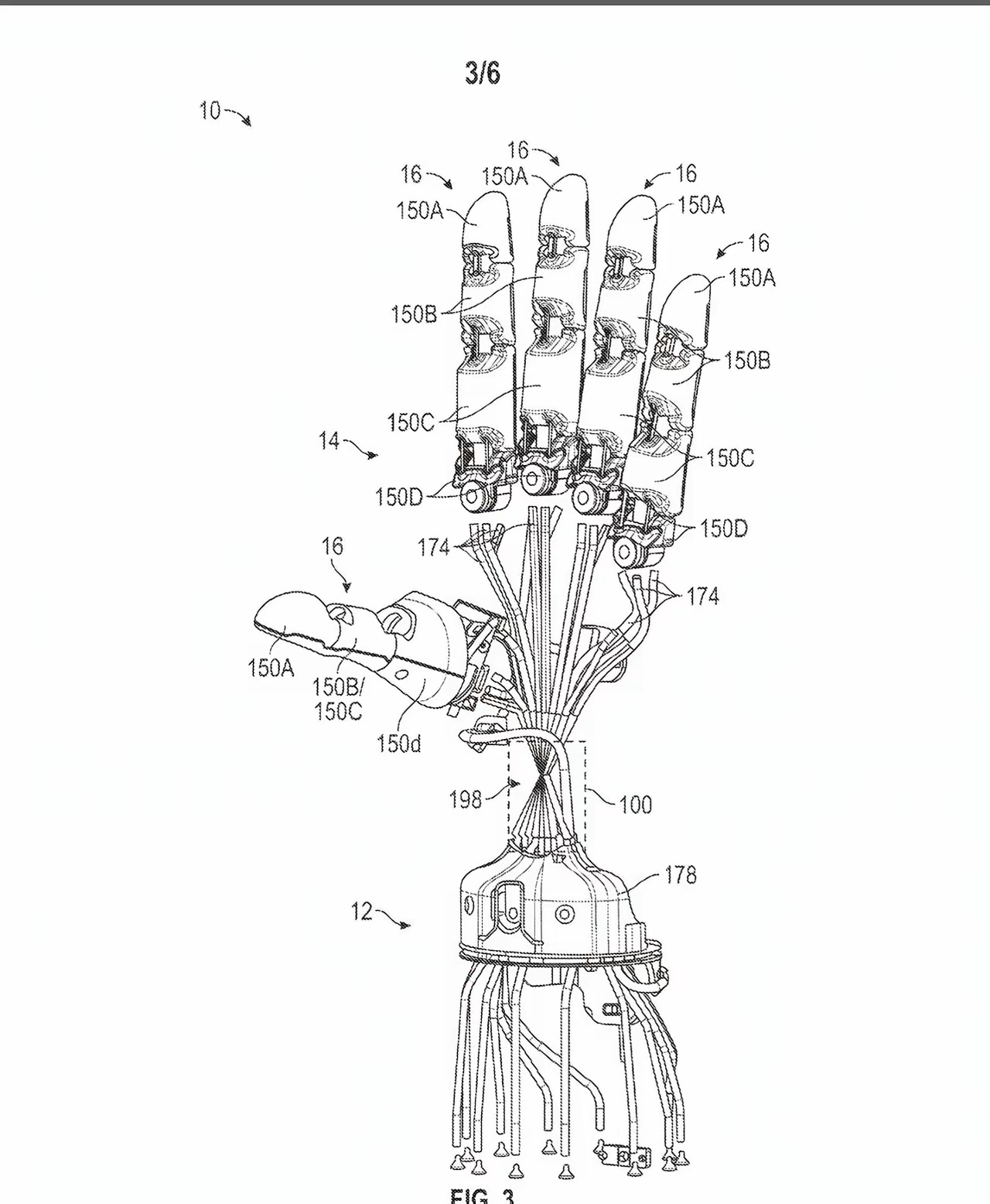
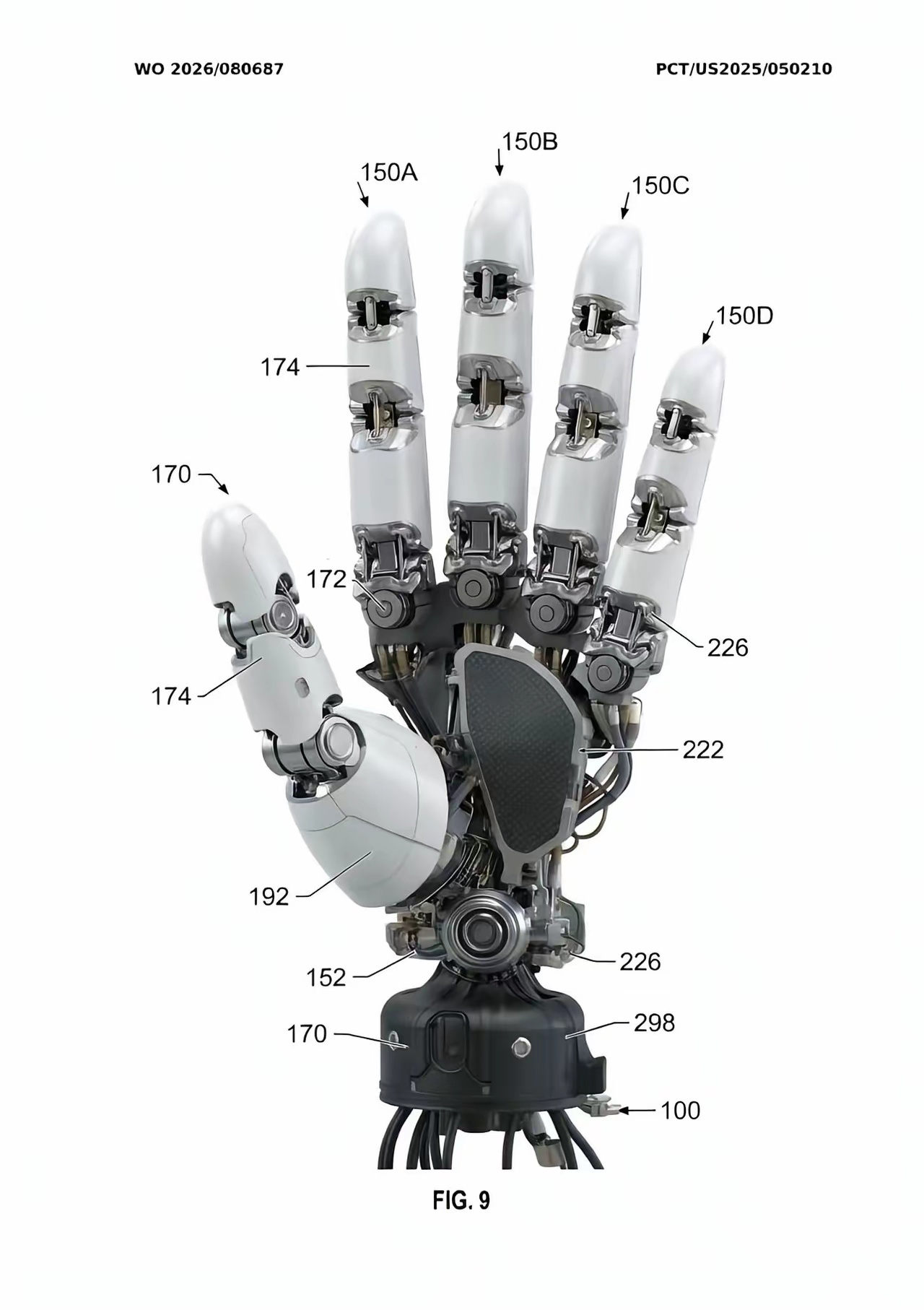
马斯克公开了特斯拉擎天柱机器人手部专利。特斯拉抛弃传统思路,将笨重的执行器挪到前臂,手部保留轻量化结构件,通过缆绳如人体肌腱般拉动手指。每根手指有4个自由度,手腕2个,整只手共22个自由度,是第一代擎天柱机器人的两倍。还解决了手腕动作时手指抖动的问题,采用“前臂放执行器+腱索驱动+手腕转向走线+蜗轮蜗杆自锁”的方案,攻克了机器人灵巧手领域重量、串扰、能耗、可制造性四大痛点。马斯克认为只追求跑步、后空翻的机器人毫无意义,手部研发才是机器人工程约60%的核心难度。这份专利为所有人形机器人的手部设计提供了借鉴,未来半年到一年内,很多机器人公司的手部设计可能会采用类似方案。