其实从小米汽车就能看得出来,成本和安全之间的博弈。
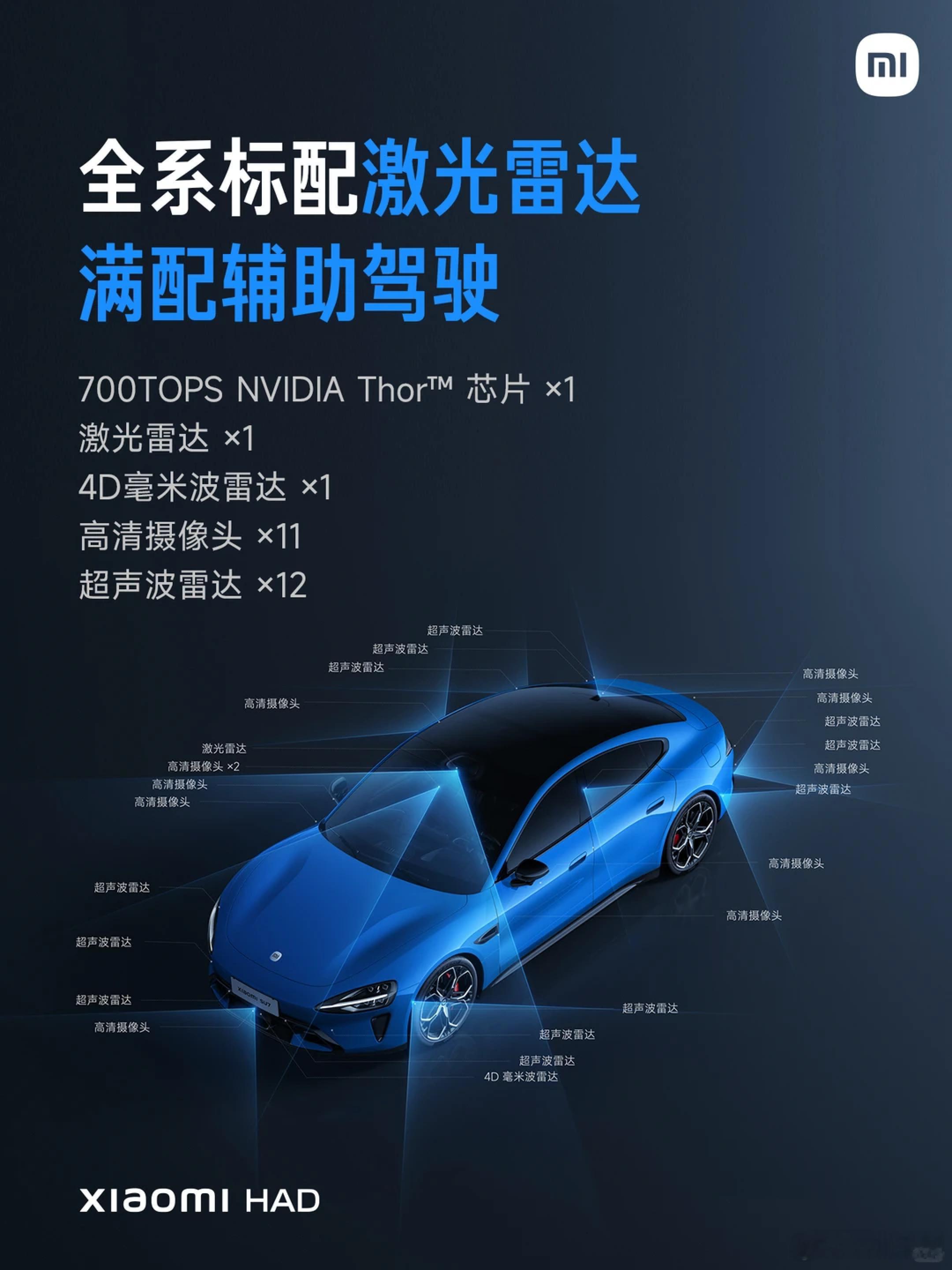
看着全车都被各种传感器覆盖了吧。
但长距+高精度的传感器,激光雷达算一个,4D毫米波雷达算一个。
超声波雷达遍布全车,只是为了泊车用,都是超短距离用的。
高清摄像头实际对远距的探测精度不足,而且还会受到光线和恶劣环境(如雨雾、沙尘)。如果要那种昂贵的光学镜头,价格并不便宜,而且也非常需要算力。
再回到车上,小米汽车的高精度远距探测传感器,激光雷达(车顶向前)和4D毫米波雷达(车头向前)都是向前的。
车辆左右的侧面和后面的中远距离探测实际都是比较薄弱的。
这就会出现什么样的情况:就是侧面变向,需要探测后方远处来的车辆,而光线较弱的时候,车就会反应很迟疑,不敢变道,必须要速度提起来才敢变道,这个在夜晚的高架上会尤其明显。
当然,不止是小米汽车这样,大多数辅助智驾都是这样。
如果要安全一些,有的车会设置三个毫米波雷达,一个长距,两个中距,放在车头的三个点(车牌中间位置,两个车灯位置)。或者用多个长距毫米波雷达,车头/车尾用。
当然,最好的方案就是激光雷达全覆盖,也就是四到五个激光雷达全覆盖,再配上毫米波雷达全覆盖,四到五个毫米波雷达。
但上述硬件奢侈,算力也得奢侈,算法还得支持。
其实只有溢价很高的豪车才能支持这种方案。
但为什么现在国产豪车不支持,因为国产豪车别的地方堆料也够狠了,国产的豪车实际还是没有溢价非常高的伪豪车,和国外的真豪车的高利润没法比。而没有非常高溢价的,就不能支持这种奢靡的智驾硬件方案,其他料堆足了,这个智能硬件也堆足,带来的增益并不能让消费者支持。
至于摄像头用全覆盖微光(夜间用)和长距(镜头贵),也是一种方案了,但依然会受到光学和天气的负面影响。